Force
There are four fundamental forces:
- The strong force - also called the nuclear force - is the most powerful, but it acts only over subatomic distances to bind nucleons together.
- The electromagnetic force is about one order of magnitude weaker, but it acts over much larger distances. It holds atoms together and explains everyday effects such as magnets sticking to refrigerators.
- The weak force is roughly ten orders of magnitude weaker than the strong force and plays a key role in radioactive decay.
- Gravity is about fifty orders of magnitude weaker than the strong force. It governs weight and controls the orbits of planets.
Center of mass
The center of mass is the weighted average position of a system, where each position is weighted by its mass. In a Cartesian coordinate system, you find it by taking a weighted average of the x-, y-, and z-coordinates. The result is the single point where the system’s mass can be treated as “balanced.”
For example, in a system made of the Earth and a small chicken, the center of mass lies inside the Earth because the chicken’s mass is negligible compared with Earth’s. For two equally massive chickens, the center of mass is exactly halfway between them.
You don’t need absolute coordinates to find a center of mass. Any convenient reference point works, as long as you measure all positions relative to that same point.
For symmetric objects like a sphere or an inner tube, the center of mass is at the geometric center.
Newton’s laws
Newton’s first law, inertia
Newton’s first law (the law of inertia) says that an object keeps its current state of motion unless an external force acts on it. That means:
- If an object is at rest, it stays at rest.
- If it’s moving, it keeps the same speed and direction.
A force is required to change an object’s velocity (its speed, its direction, or both). This is why we say objects resist changes in motion.
Newton’s second law ()
Newton’s second law, written as , says that a net force on an object produces an acceleration in the direction of that net force. The standard unit of force is the Newton ().
Both force and acceleration are vectors, meaning they have magnitude and direction.
Newton’s third law, forces equal and opposite
Newton’s third law says that for every applied force, there is a reaction force (counterforce) that is equal in magnitude and opposite in direction.
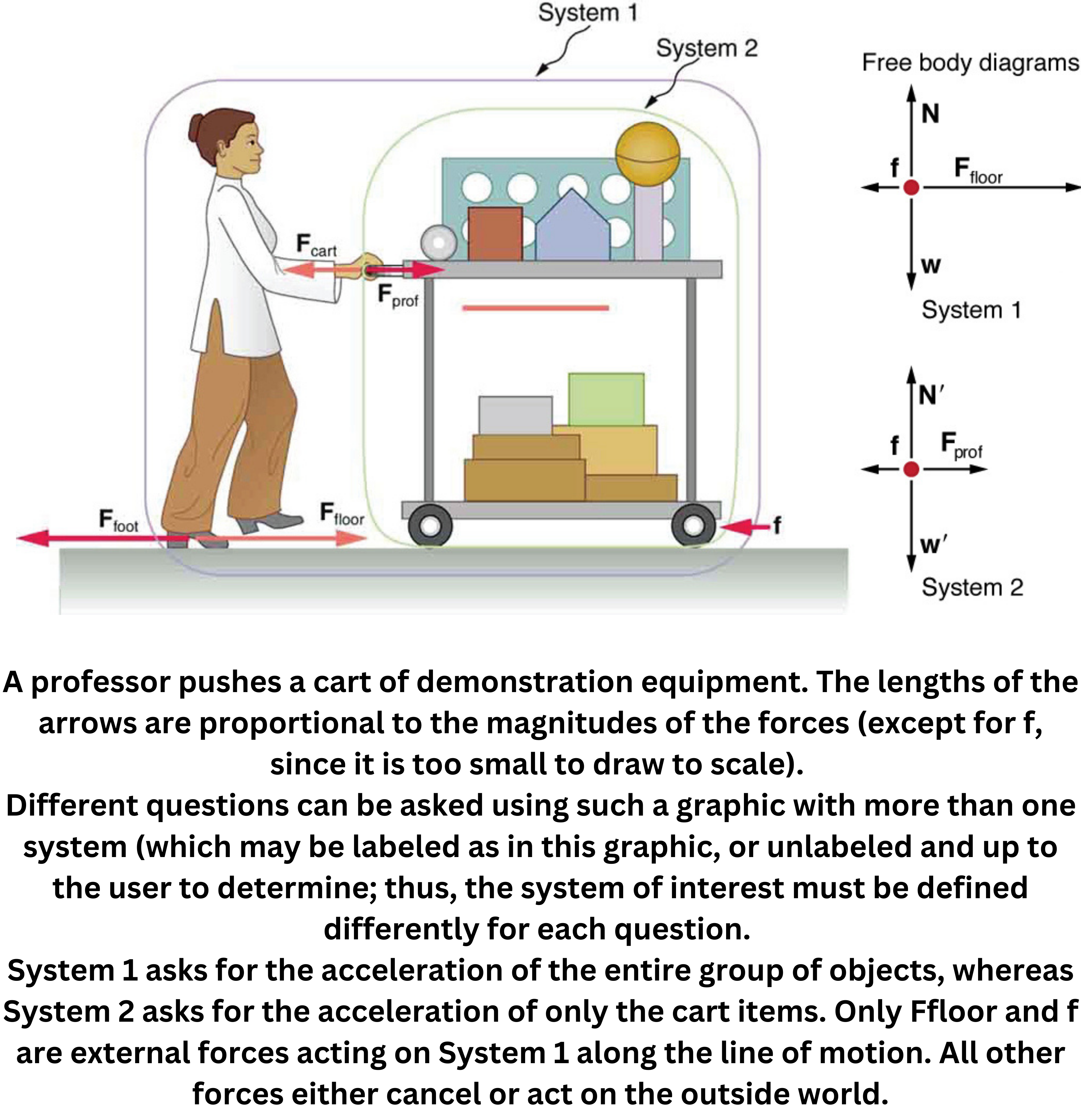
Forces always occur in pairs: if one object exerts a force on a second object, the second object simultaneously exerts a force back on the first. This action-reaction idea is especially useful when you’re deciding which forces are external to a system and which are internal.
Fields
A field is often drawn using lines that show both strength and direction. When the lines are close together, the field is strong; when they’re farther apart, the field is weak. Because the lines point in a particular direction, a field is represented as a vector.
An object moving in a field can travel parallel to, perpendicular to, or in a spiral path relative to the field lines, depending on the situation.
Uniform circular motion
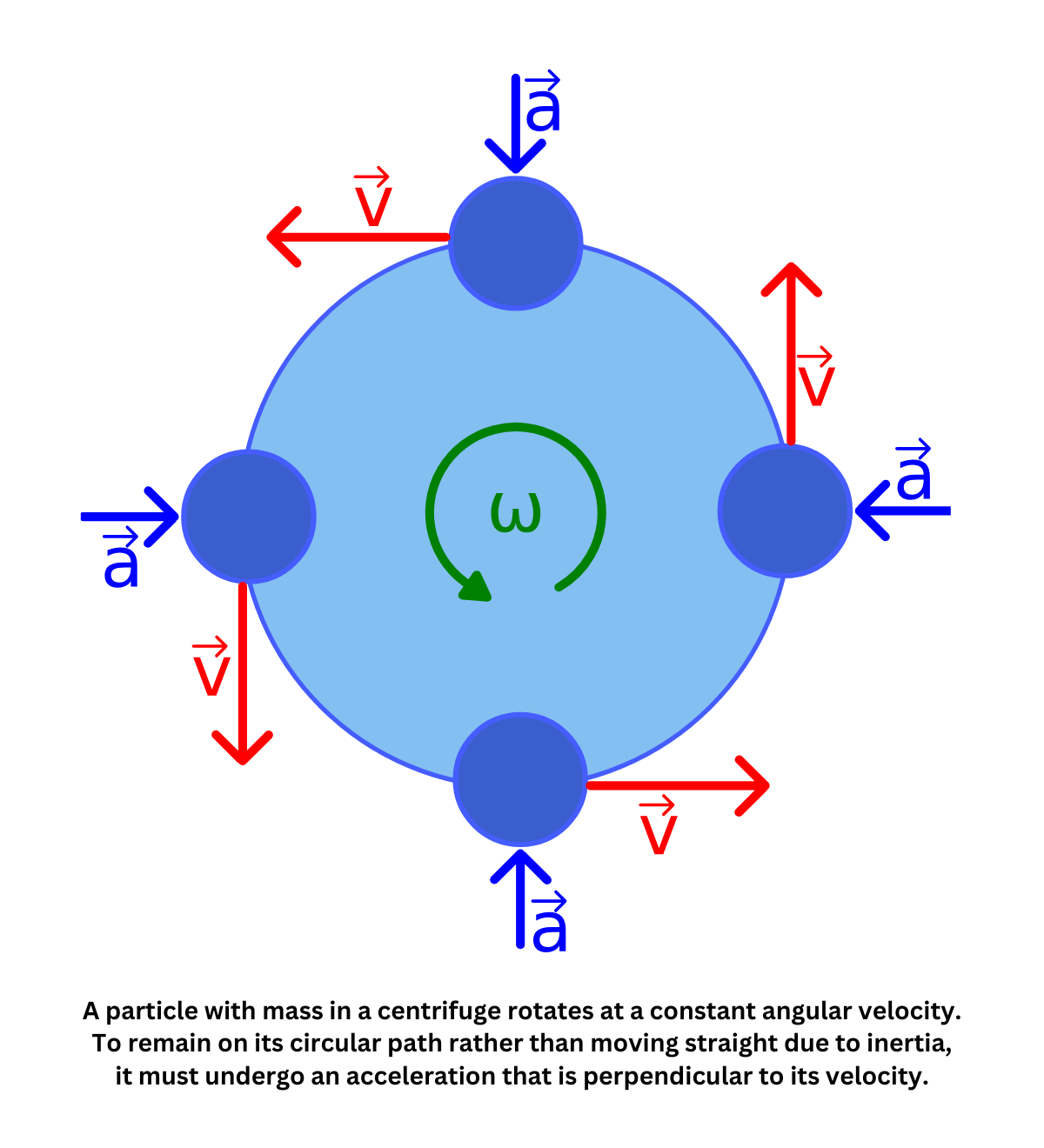
Uniform circular motion is the simplest kind of curved motion: an object moves in a circle at constant speed. Even though the speed stays the same, the velocity changes continuously because its direction keeps changing. A changing velocity means there is an acceleration, called centripetal acceleration.
Centripetal acceleration is produced by a net external force directed toward the center of the circle. That net inward force is called the centripetal force (it’s not a new type of force - just the name for the net force that keeps the motion circular).
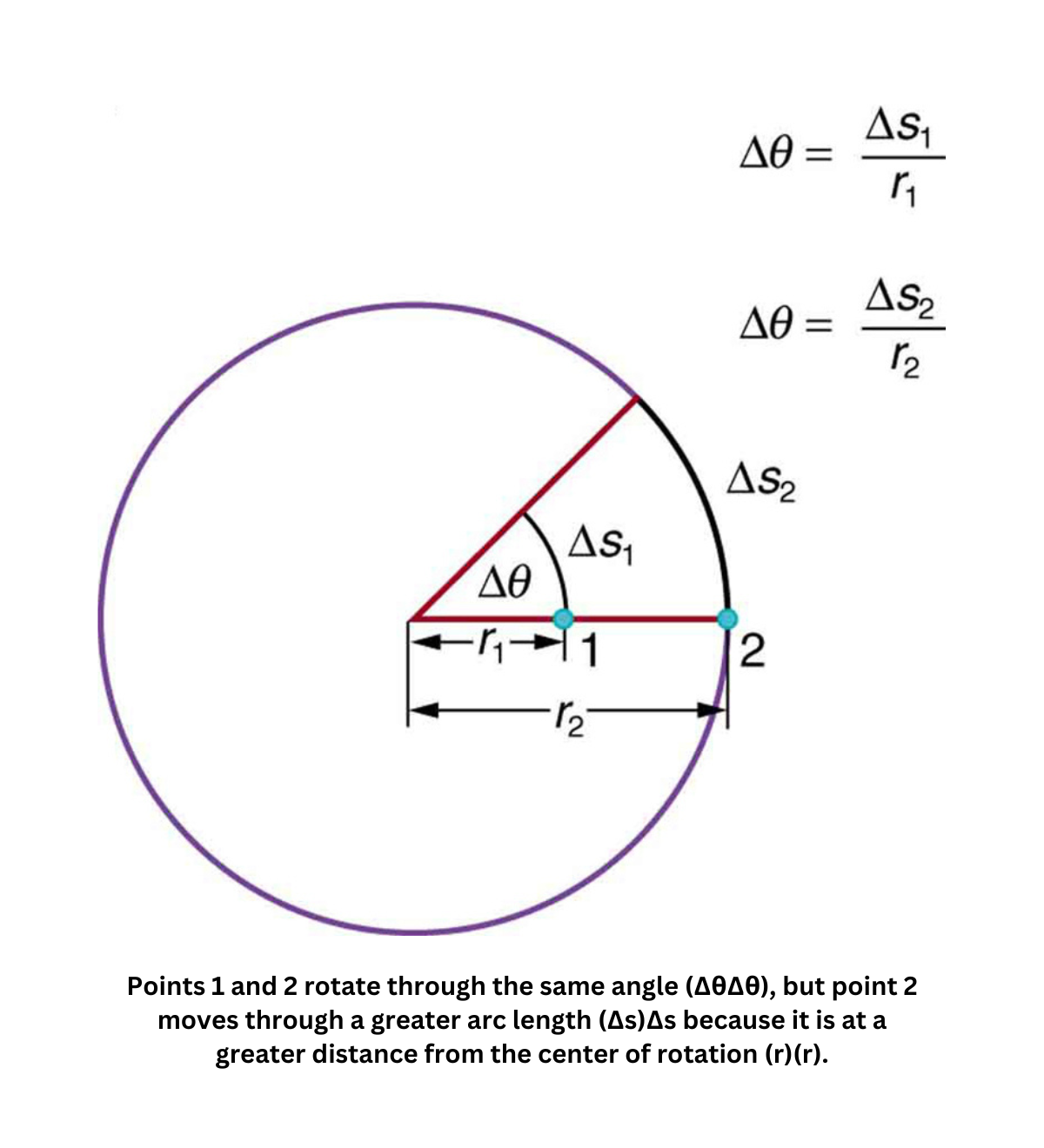
Rotation angles are measured in radians (), where corresponds to one full revolution.
- The arc length () is the distance traveled along the circular path.
- The radius () is the distance from the center of the circle to the path.
For one complete revolution, the arc length equals the circumference, . That matches the rotation angle .
Angular velocity ()
Angular velocity is the rate at which an angle changes:
Here, is the angular displacement during the time interval . If is larger over the same time, the angular velocity is larger. Angular velocity is measured in radians per second ().
This is the angular version of linear velocity (), which measures how fast an object moves along a path. If a point on a fan blade travels an arc length in time , its linear velocity is:
Arc length and angular displacement are related by , where is the radius. Substituting gives:
So,
Centripetal acceleration
In circular motion at constant speed, the instantaneous velocity is always tangent to the circle. Because the direction of the velocity keeps changing, the object accelerates toward the center of the circle. This inward acceleration is the centripetal acceleration.
By comparing the triangle formed by velocity vectors at two nearby points with the triangle formed by the radius () and the arc length (), we can relate the change in velocity to the geometry of the circle. This leads to the standard result for the magnitude of centripetal acceleration:
So, higher speed or a smaller radius produces a larger centripetal acceleration. That’s why taking a sharp curve at high speed requires much more force.
Any net force that produces uniform circular motion is called a centripetal force. It points toward the center of curvature, the same direction as the centripetal acceleration.
By Newton’s second law (), the net force equals mass times acceleration. For circular motion, the acceleration is , so the magnitude of the centripetal force is:
Weight
Weight is the gravitational force on a mass :
On Earth, . So a 1.0 kg object weighs:
When an object is at rest on a horizontal surface, the normal force balances its weight.
On an inclined plane, the normal force and friction combine as vectors to counteract the weight.
Friction, static and kinetic
Friction is the force that resists relative motion between surfaces in contact. It acts parallel to the surface and always opposes actual motion or the tendency to move.
- Kinetic friction acts when surfaces slide past each other. For example, a shopping cart slows as it rolls across a flat parking lot because surface imperfections create resistance.
- Static friction acts when surfaces are not sliding. It adjusts as needed (up to a limit) to prevent motion.
Static friction is always greater than kinetic friction. Correspondingly, the coefficient of friction for static friction is greater than that for kinetic friction. The coefficient depends on the materials in contact and is determined empirically.
On a horizontal surface, the normal force equals the object’s weight. On an inclined plane, the normal force equals the weight times the cosine of the incline angle. Lubricants reduce friction by changing surface properties and lowering the coefficient of friction. Friction also produces heat as a by-product.
Motion - inclined plane
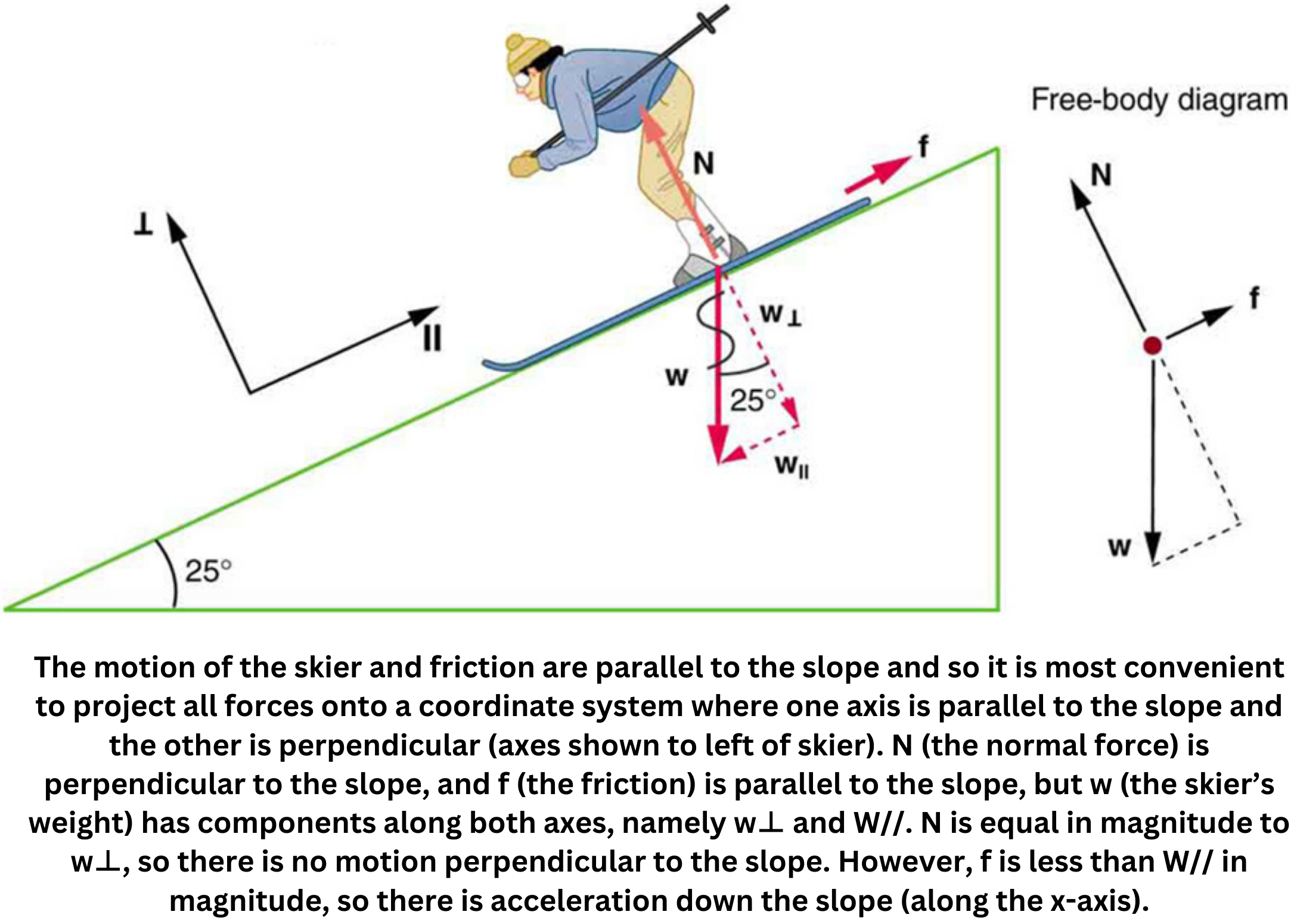
On an inclined plane, the weight force is split into two components:
- One perpendicular to the surface
- One parallel to the surface
The perpendicular component is:
This component is balanced by the normal force from the surface, which prevents the object from sinking into the plane.
The parallel component is:
This is the component that tends to pull the object down the plane.
Friction acts along the surface and opposes sliding. For an object at rest, static friction balances the parallel component of gravity. When the object moves at constant velocity, the parallel component is balanced by kinetic friction. If the object starts to slip or accelerate, the gravitational pull along the plane exceeds the static or kinetic friction, respectively.
When you push an object up the incline, the applied force must overcome both the parallel component of gravity and friction. You’ll want to resolve the applied force into components, because only the component parallel to the plane contributes to motion along the surface.
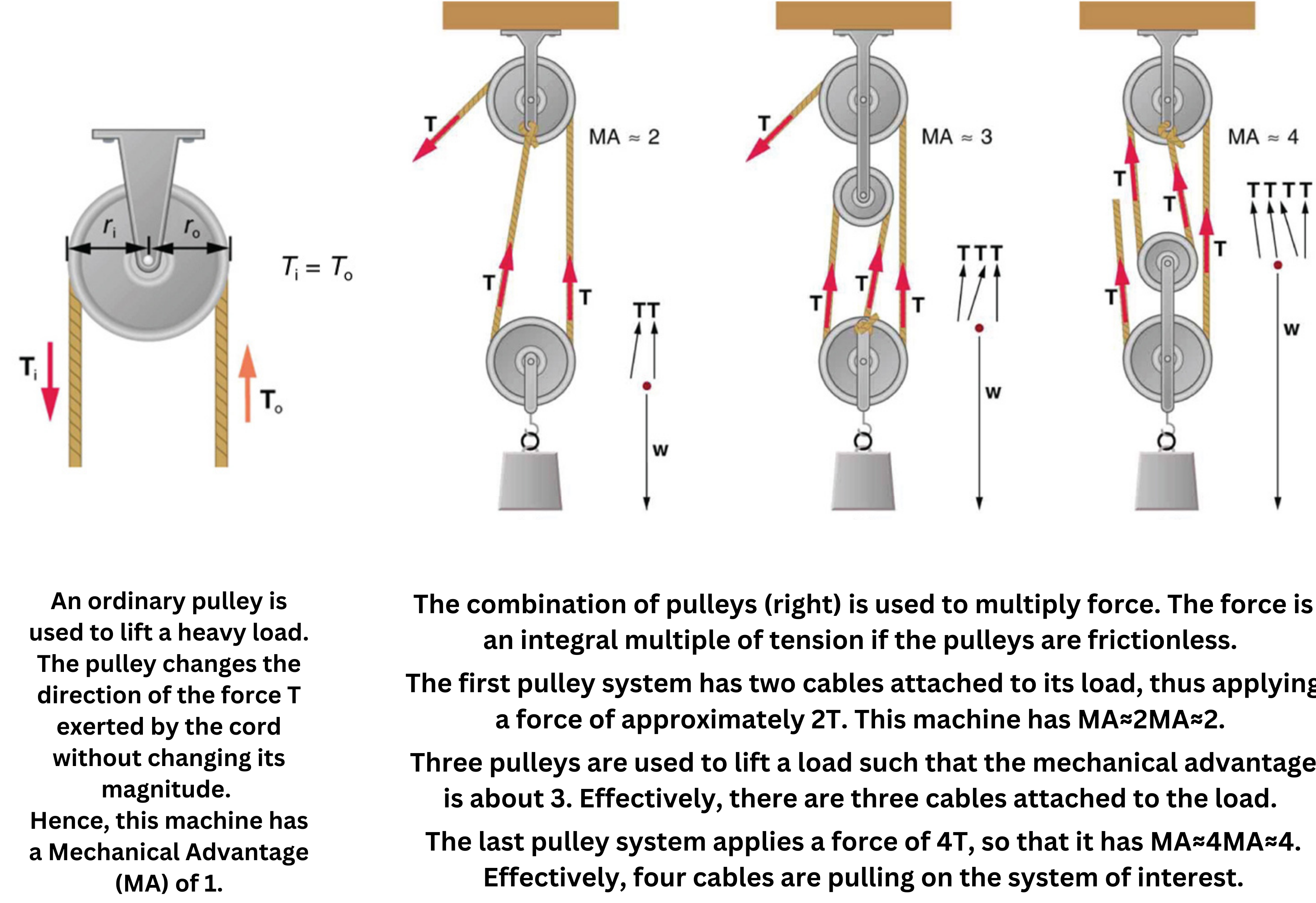
Pulleys
A pulley system reduces the force needed to lift an object, but it increases the distance you must pull. With a moving pulley, both sides of the rope support the load. In more complex systems, additional rope segments reduce the required force further, with a proportional increase in pulling distance.